本项目研究重点将放在机械臂以及机械手的机械结构设计、无人机与机械臂的动力学模型建 立、控制器的设计和轨迹规划上,旨在获得稳定而精确的抓取。本研究内容可大致分为以下几步: (1)对机械臂以及机械手的机械结构进行设计并在 SolidWorks 软件下建立其 3D 模型,先利用 3D 打印机将机械臂和机械手的各零部件打印出来并进行组装装配,选择合适的控制器进行机械 臂的控制实验,在确保其一定自由度以及抓取功能的同时,在实验中进一步完善和优化机械臂的
结构。最后根据无人机与机械臂性能参数,选择合适的型材,进行零件加工,搭建实验硬件平台。 (2)分析不同组合的无人机-机械臂模型,根据优化后的机械结构,通过欧拉-拉格朗日方程,
对本课题下的无人机-机械臂复合系统进行动力学模型的建立。 (3)根据目前已经了解的知识以及查阅的相关资料,将对这些控制算法进行比较并做适当改
进。例如比例积分微分控制(PID)以及自适应滑膜控制(ASMC)等,通过对比,进而选择合适的控 制算法,以实现无人机机械臂的稳定抓取。
(4)将无人机-机械臂整个系统的特点结合起来,设计控制器的期望轨迹。无人机采用内环与 外环共同控制,其中将姿态控制作为内环控制,位置控制作为外环控制。而对于本课题中无人机 上的机械臂控制,本研究将直接采用简单而传统的 PID 控制。
(5)确定无人机以及机械臂的相应控制算法之后,研究并搭建实验平台的软件构架,本课题相 关的上层控制算法将基于 ROS 开发,提高其可开发性和扩展性,并在 Gazebo 下进行相关实验仿 真。由于 Gazebo 的仿真环境与实际无人机的实验环境都相当接近,因此其实验仿真结果也更加 具有可靠性和易实现性。
本研究首先在 SolidWorks 软件下对无人机机械手臂进行了三维空间上的 3D 建模,再将设计 的仿生机械手臂利用 3D 打印机进行打印并装配,同时进行实验。同时为了稳定控制无人机,在 Gazebo 仿真环境下进行无人机机械臂的抓取仿真,以此验证控制算法的合理性。最后,将无人机 与机械臂进行装配结合,进行无人机机械臂抓取实验。
技术指标包括:研究制造出增强无人机的仿生智能机器手臂,使无人机能实现基本飞行和一 定抓取功能。主要如下: 1)各个机械零部件稳定运行,并合理安排电源,控制板与视觉部分电 子元器件的安放。 2)成功实现无人机的飞行与机器手臂的抓取功能。 3)增强无人机的仿生智 能机器手臂能实现稳定控制。
仿生机器手臂的设计
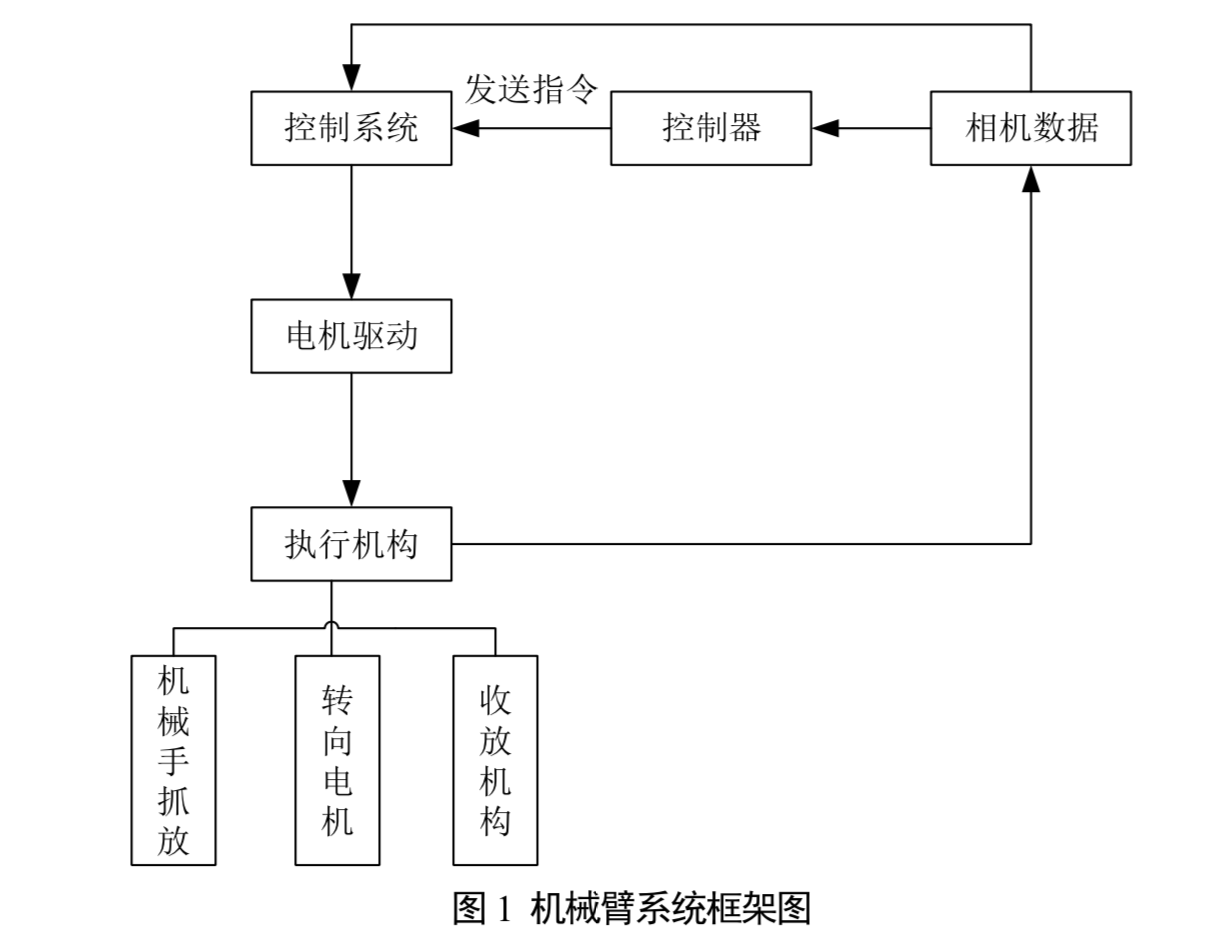
此机械臂系统主要包括控制部分、电机驱动部分、传感器部分以及机械手的执行部分。其中传感器部分直接利用无人机上的相机,获取信息,再经过处理得到所需数据,如图 1 为此机械臂的系统框架。在无人机的飞行过程中,利用传感器检测得到与目标物体的深度位置信息,当达到 一定范围后,控制器发送控制指令给系统,驱动电机控制机械臂,根据事先规划好的运动轨迹进 行轨迹跟踪,当机械臂到达指定位置,在控制机械手抓取目标物体,完成无人机的抓取。与此同 时,无人机和执行机构的运动信息也通过传感器反馈给控制器,实现回路闭环,完成自主控制。
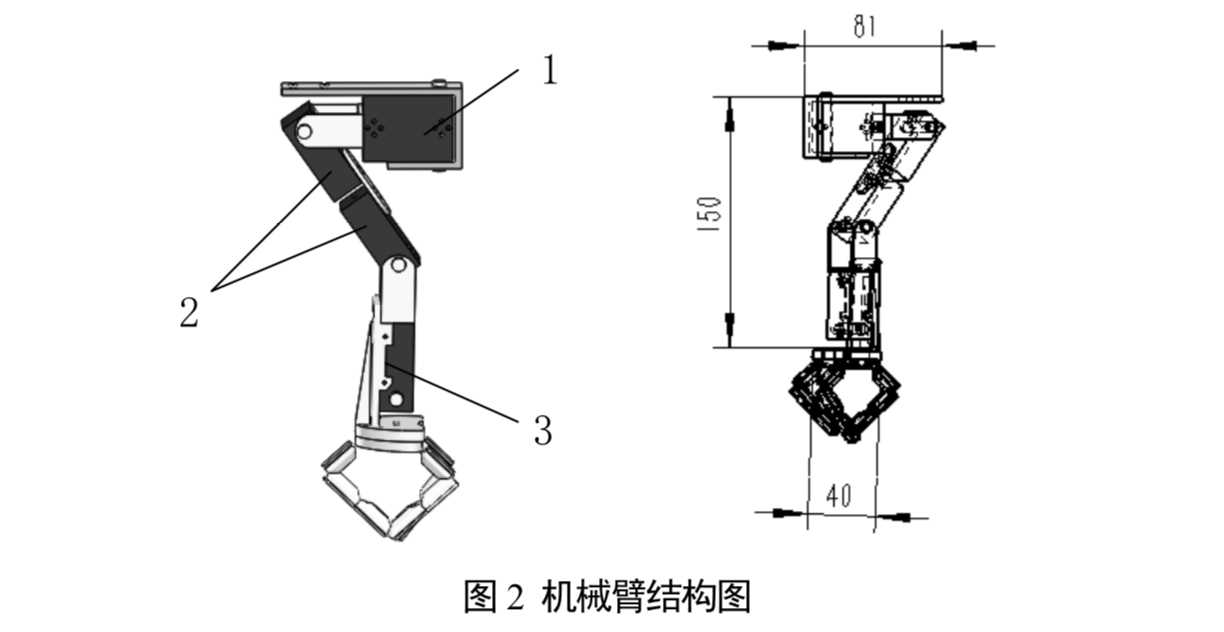
整个机械臂的结构设计部分都在 SolidWorks 软件下完成,根据性能要求,设计与之对应的机 械结构,其设计模型如图 2 所示。
通过控制电机 1 号以实现机械臂在机体水平面上的转动,电机 2 号由两个电机组成,可控制 机械臂的收放,3 号电机与机械手通过可承受高强度力的细线相连,并连通至手指,以此通过一 个电机控制机械手不同程度的张合。而在不同情况的降落时,机械手既可以全部张开,形成一个 水平面,又可有一定的闭合。
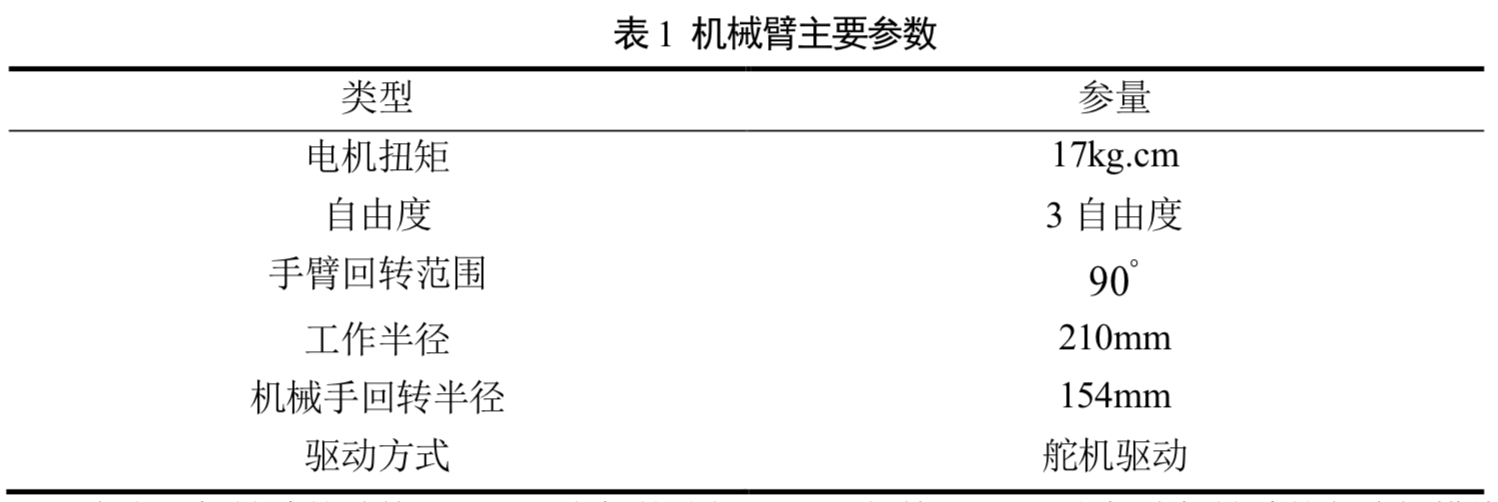
如表 1,为机械臂的主要参数:
在完成机械臂的结构设计以及电机的选择之后,先利用 3D 打印机将机械臂的各连杆模块打 印出来,进行实验调试。在实验的同时,优化机械臂的机械设计,使其性能更加完善。如下图 3 为装配好的一个自由度机械臂,三自由度机械臂以及一个仅具有抓取能力,即单个机械手,并装 配在 PX4 无人机上。由图可知,机械臂各连杆上电机通过一根总线进行串联,布线十分方便,最 后的机械手通过一个电机进行控制,极大的减轻了机械臂的质量。
在调试过程中,利用 STM32 作为开发板,用 C++编写其控制程序,实现机械臂对目标的抓 取。在控制过程中,需事先对每个电机进行编号,之后,可通过总线逐步控制每个电机的转动。 在检测到目标物体距离机械手的位置后,再通过离线的路径规划,控制各个电机的转动角度,从 而进行机械臂对路径的跟踪,以实现抓取。

无人机机械臂的仿真
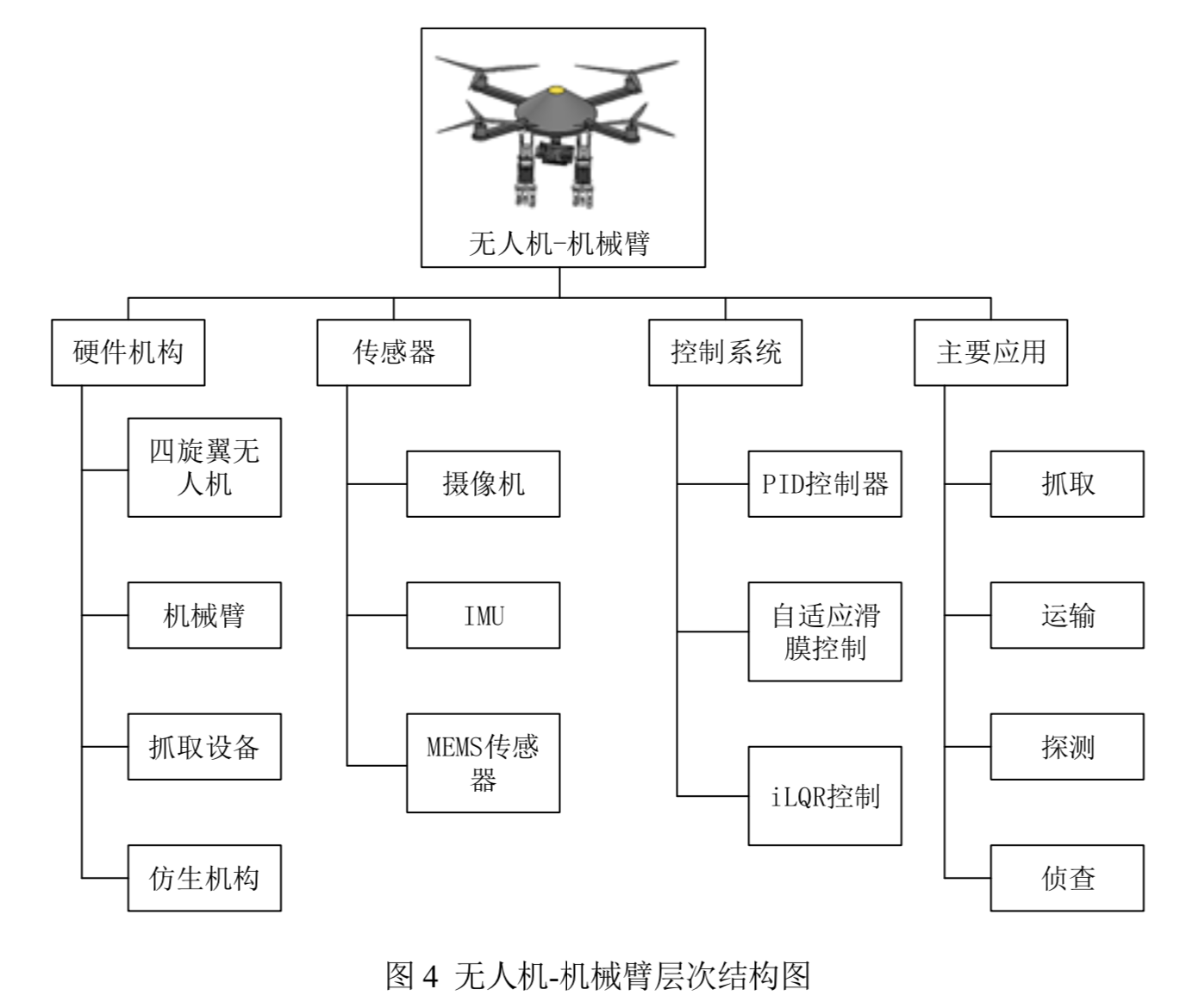
如图 4 为无人机-机械臂的层次结构图,此系统主要包括硬件机构,传感器,控制系统和主要 应用等四大部分。硬件机构主要包括四旋翼无人机平台,机械臂以及用于抓取的仿生机械手。为 获得无人机状态信息,识别并检测移动平台和目标,需要用到 IMU,MEMS 传感器以及摄像机等。 在控制系统中,包含控制无人机和机械臂的自适应滑模控制,iLQR 以及传统的 PID 控制算法等。 结合以上硬件平台,传感器数据以及稳定的控制系统,此无人机-机械臂复合系统可应用于一般无 人机无法操作的场景,如进行抓取,运输,探测以及侦查等,使其运用场景得到了扩展,可使用 性也更强。与此同时,通过加入视觉算法,无人机对环境的适应性也得到提高,而无人机机械臂 这一领域的研究也变得丰富,具有很强的研究性与研究的必要性。
在做实验仿真之前,得先搭建仿真平台。本 文的仿真平台是在 Ubuntu 操作系统下的仿真器 Gazebo,利用 C++进行编程,在 ROS 的框架上实 现各个指令的传达,完成各节点的通信。创建本文研究所需的无人机-机械臂系统模型,如下图 5 所示。此模型在无人机 PX4 的基础上添加了一个两自由度的机械臂并配有一个机械爪,其中机械 爪可进行闭合运动,机械臂和无人机之间可以转动,两个机械臂之间也可进行转动。无人机内自 带了摄像机和惯性测量单元(IMU)等传感器,在仿真时,还能得到无人机的状态变化信息。因 此,为了得到机械臂的变化曲线图,只需要对机械臂的控制进行编程,将其各连杆的状态以节点 信息的形式发布出来即可。并且,此三维模型具有良好的扩展性,还可通过添加其他传感器以获 得更多信息,为控制算法的验证提供有利平台。
增强无人机的仿生机器手臂实验结果
装配机械臂的无人机可稳定飞行,成功实现无人机机器手臂的抓取功能且准确率在90%以上,仿生智能机器手臂能实现稳定控制。

如图11所示,无人机抓取目标物体并在空中稳定飞行,当降低无人机的飞行速度时,发现机械臂抓取的稳定性也更高,同时准确率也相应提高,经过100次实验,其抓取准确率平均在91% 左右。
在无人机机械臂抓取目标物体的过程中,机械臂需要能够稳定控制,以准确抓取目标物体。 为此使用了总线电机,以便更简单的发送控制指令,更有效的控制机械臂,如下图13所示:
同时,为了使用不同的环境,可根据需求更换机械手臂,如图3为制作的另一种仿生智能机 器手臂。其中还可根据需要,换成自由度不同的机械臂,如一个自由度的仿生机械爪,两个自由 度以及三个自由度的仿生机械臂等。