本项目开发一种新型的无人环境探测器。主要涉及嵌入式开发、机械设计及 加工、无线通信等领域。将无人机和探测车结合,实现陆空两栖方式对突发环境 事件进行紧急监控,对于沙漠、沼泽、爆炸的化工厂等危险、环境恶劣或者人员 无法立即靠近的地点进行实时快速的监测和考察。使用该系统的人员可以手动控 制搭载探测车平台的飞行器在目标上空进行航拍和定位,在发现需要实地探测或 者进行实地环境数据、材料的采集的目标地点时,无人机直接释放搭载有实时图 传系统和机械臂、各种传感器的陆地探测小车到指定地点,操作人员可手动遥控探测车进行图像、环境数据的采集和样本收集,并实现探测车和无人机的任务完 成后的自动对接和回收。探测车可以在实现目标功能之后自动与飞行器重新对接, 将样本和数据带回。比目前使用的人工或者无人直升机远程勘察,之后派人进行实地勘探的方案更具有实时性和安全性。
无刷电机,电子调速器,螺旋桨,飞行控制板 stm32f4 pixhawk,电池,遥控 器,机架,充电器等,要求能承重约 1.5KG。开发语言: C 语言。要求实现四通 道遥控和鸟瞰视图的图像传输和外挂探测车平台。要求搭载 GPS 模块实时返回 飞行器的坐标和高度信息。 M600 平台比较稳定成熟,且易于搭载各类外挂装置如空气电化学传感器、 实时图传模块、GPS 定位模块、视觉定位对接模块、与探测车的机械连接模块等。
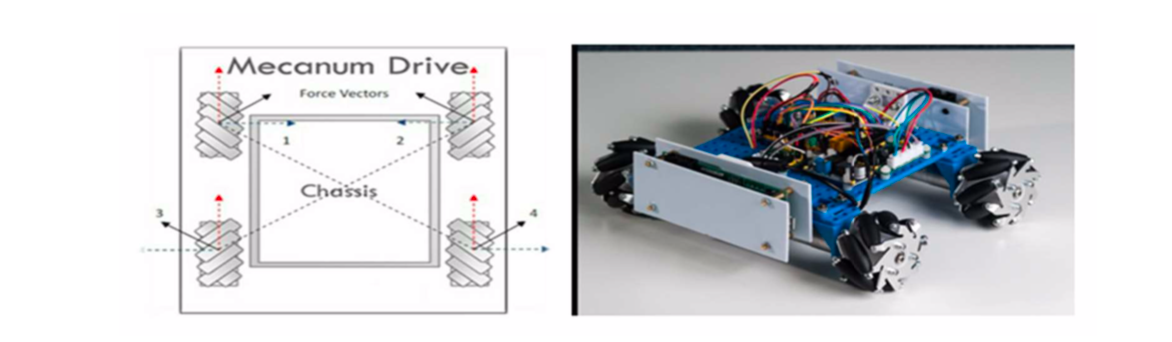
使用C语言(arduino 编程语言 c/c++)对车辆进行开发。实现车载的实时图传, 遥控和样本数据采集功能,具体硬件:车载 CCD、机械臂、环境监测传感器等 mecanum 小车采用智能可编程化的 Arduino 平台进行驱动和控制,实现遥控 协议解析,减速电机精确控制,MPU6050 数据处理,舵机状态机,图像识别算法等功能。 该平台可搭载各种图像、电化学传感器、机械臂等完成对应的自动化、半自动化的环境探测任务。
发现需要实地探测或者进行实地环境数据、材料的采集的目标地点时,实现 一键释放,飞行器缓降,在 GPS 模块和高度信息的辅助下,在安全高度释放探测 小车。在小车完成相应考察的数据采集后,在车载 GPS 模块和飞行器的 CCD 图 像识别模块的辅助下,实现小车自动返航到释放位置,小车与飞行器的自动对接。

本项目将无人机和探测车结合,实现陆空两栖方式对突发环境事件进行紧急 监控,对于沙漠、沼泽、爆炸的化工厂等危险、环境恶劣或者人员无法立即靠近 的地点进行实时快速的监测和考察。使用该系统的人员可以手动控制搭载探测车 平台的飞行器在目标上空进行航拍和定位,在发现需要实地探测或者进行实地环 境数据、材料的采集的目标地点时,无人机直接释放搭载有实时图传系统和各种 传感器的陆地探测小车到指定地点,操作人员可手动遥控探测车进行图像的采集, 并实现探测车和无人机的任务完成后的自动对接和回收。探测车可以在实现目标 功能之后自动与飞行器重新对接,将样本和数据带回。比目前使用的人工或者无 人直升机远程勘察,之后派人进行实地勘探的方案更具有实时性和安全性。